I am deeply interested in research topics related to intelligence. My current research focuses on the application of AI in robotics, specifically the integration of high-level reasoning ability of Large Language Models with low-level control learning ability of Reinforcement Learning methods. I am also collaborating on a Neuroscience project.
My current and past research projects include the following:
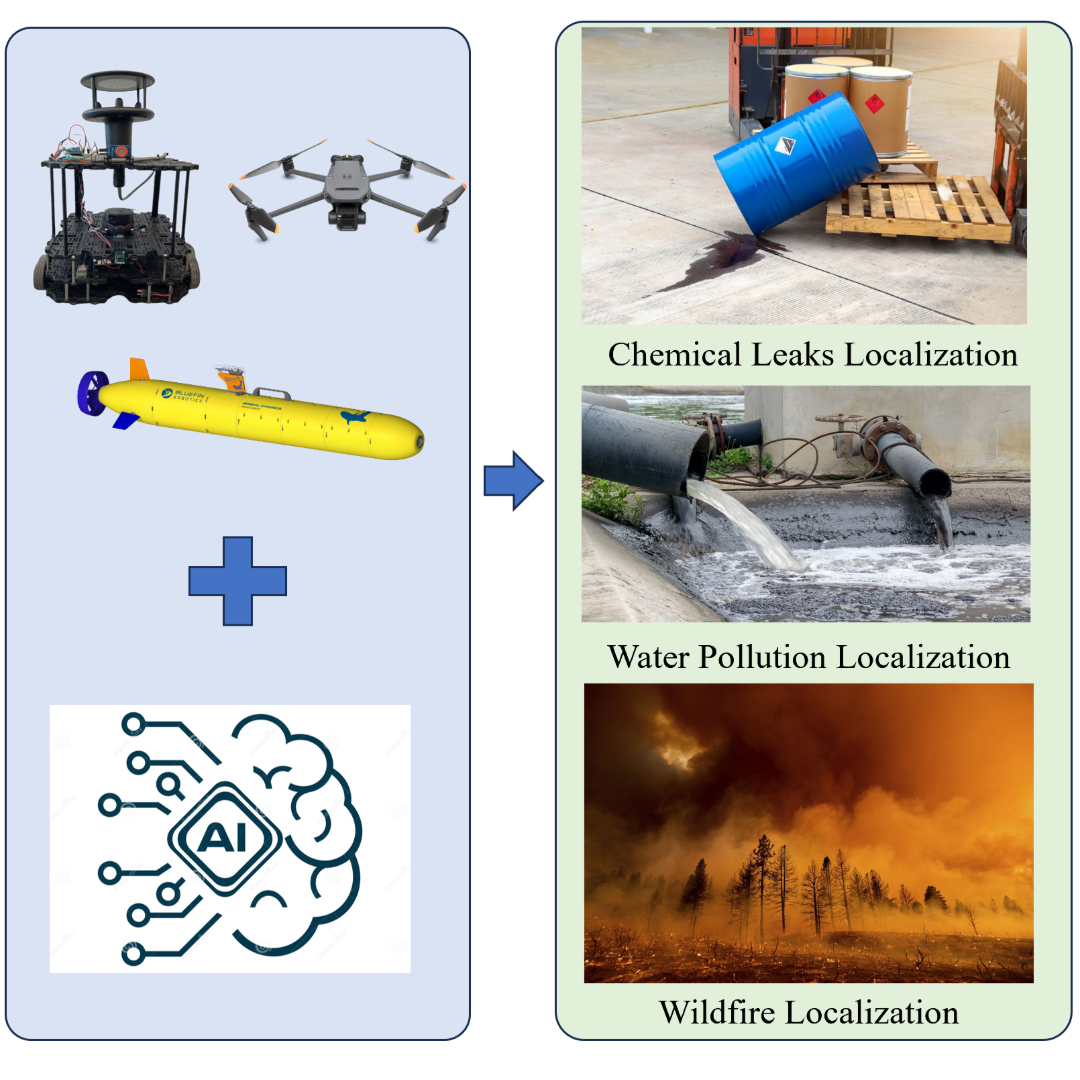
AI-based Robotic Odor Source Localization
2023 - Current, Research Assistant Advisor: Dr. Lingxiao Wang, Louisiana Tech University (LaTech)
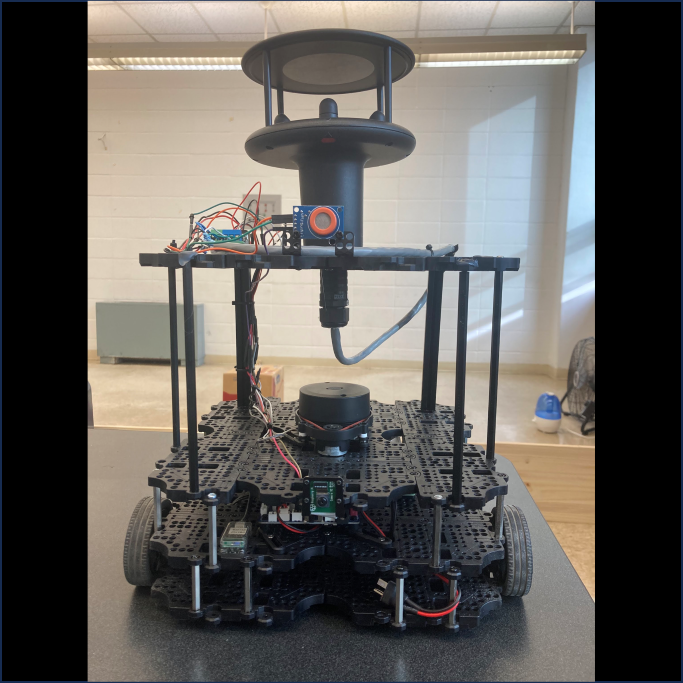
This project leverages various AI techniques to design a navigation model to guide a robot in finding a hidden odor source location with onboard vision and olfaction sensors.
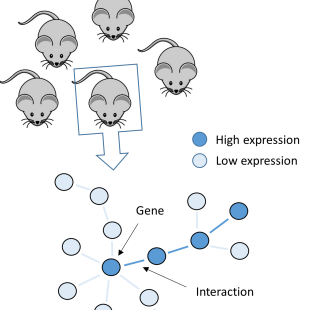
Psychedelic Gene Expression Changes on rats Prefrontal Cortex
2024 - Current, Research Collaborator LSU Collaborator: Dr. Deepak Kumbhare, Louisiana State University (LSU)
Analyzing changes in gene expression, measured using next-generation sequencing (NGS), in the prefrontal cortex of rats following the application of lysergic acid diethylamide (LSD).
A toy project to train teams of mobile robots to play Soccer. The training will be conducted first in a simulated environment, and then in real mobile robots.
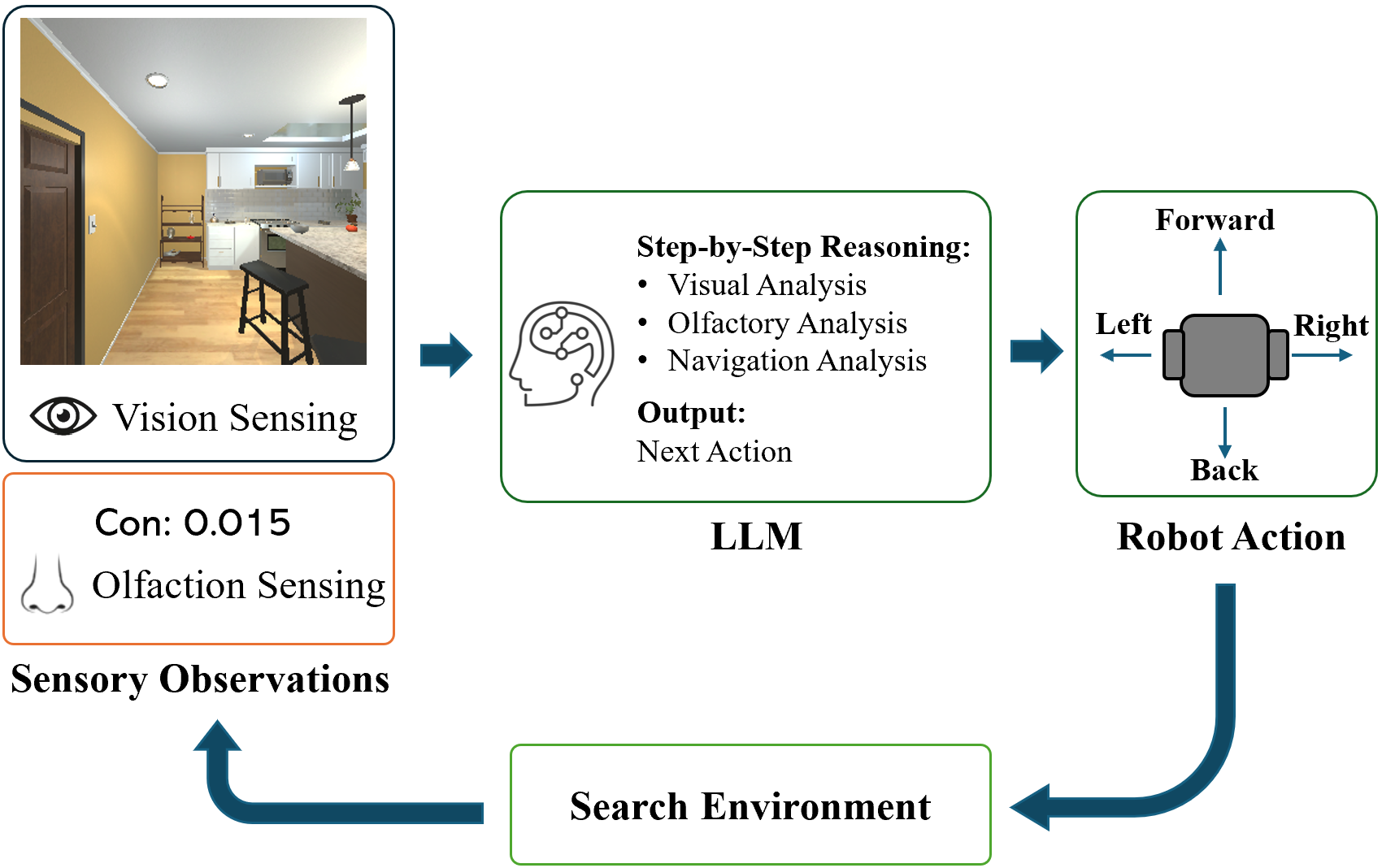
Proposed a semantic OSL navigation algorithm that integrates visual and olfactory sensing with LLM reasoning to infer likely odor sources and guide robot navigation. Simulation results show improved success rates and shorter travel distances compared to random walk, vision-only, and olfaction-only approaches.
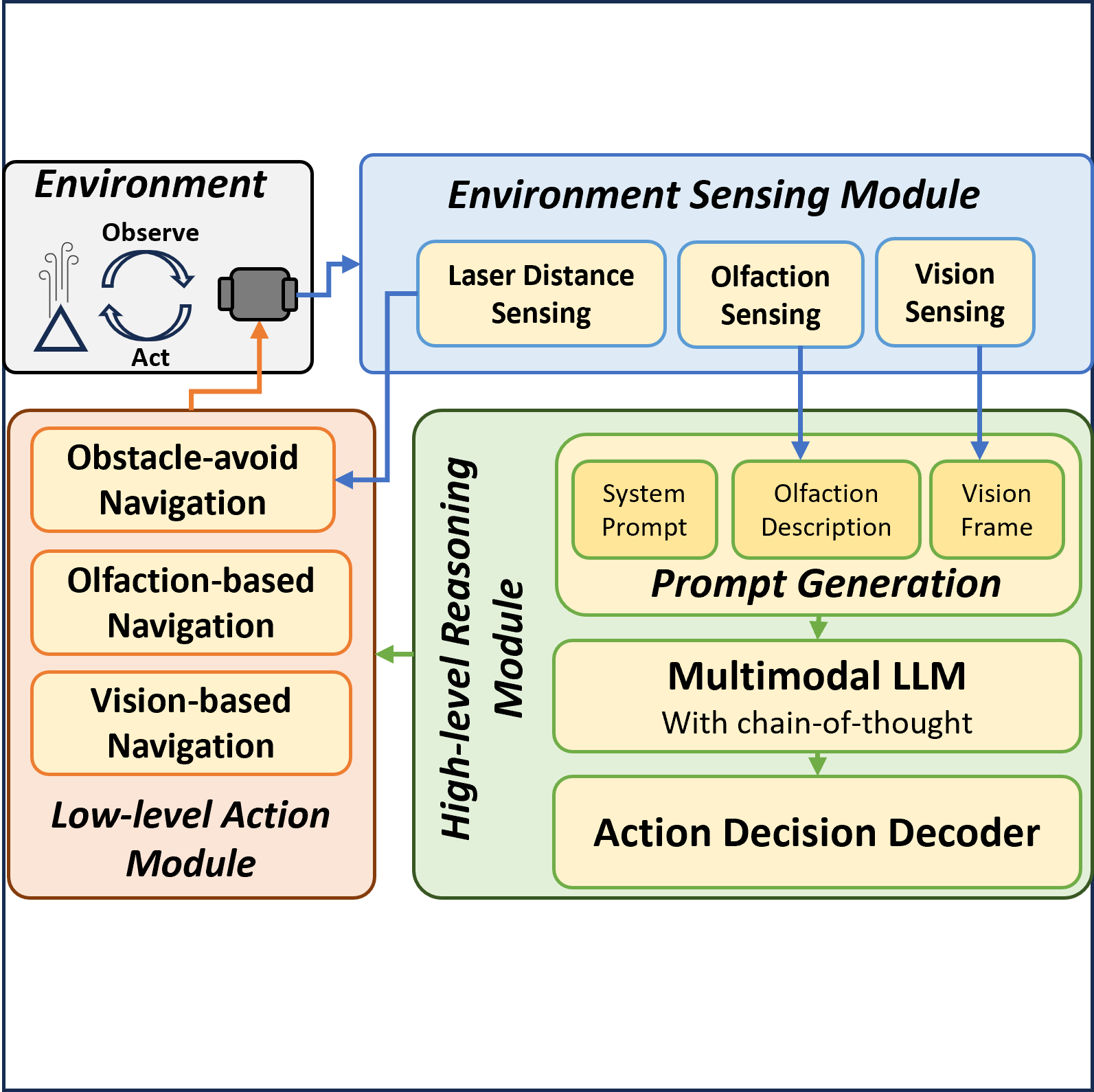
Proposed a LLM-based mobile robot navigation algorithm for robotic odor source localization (OSL) task. It includes a High-level Reasoning Module, which combines data from the robot's vision and olfactory sensors to create a multi-modal prompt. This prompt is used to query a multi-modal LLM to select navigation behaviors. A Low-level Action Module then converts this behavior into executable control commands for the robot.
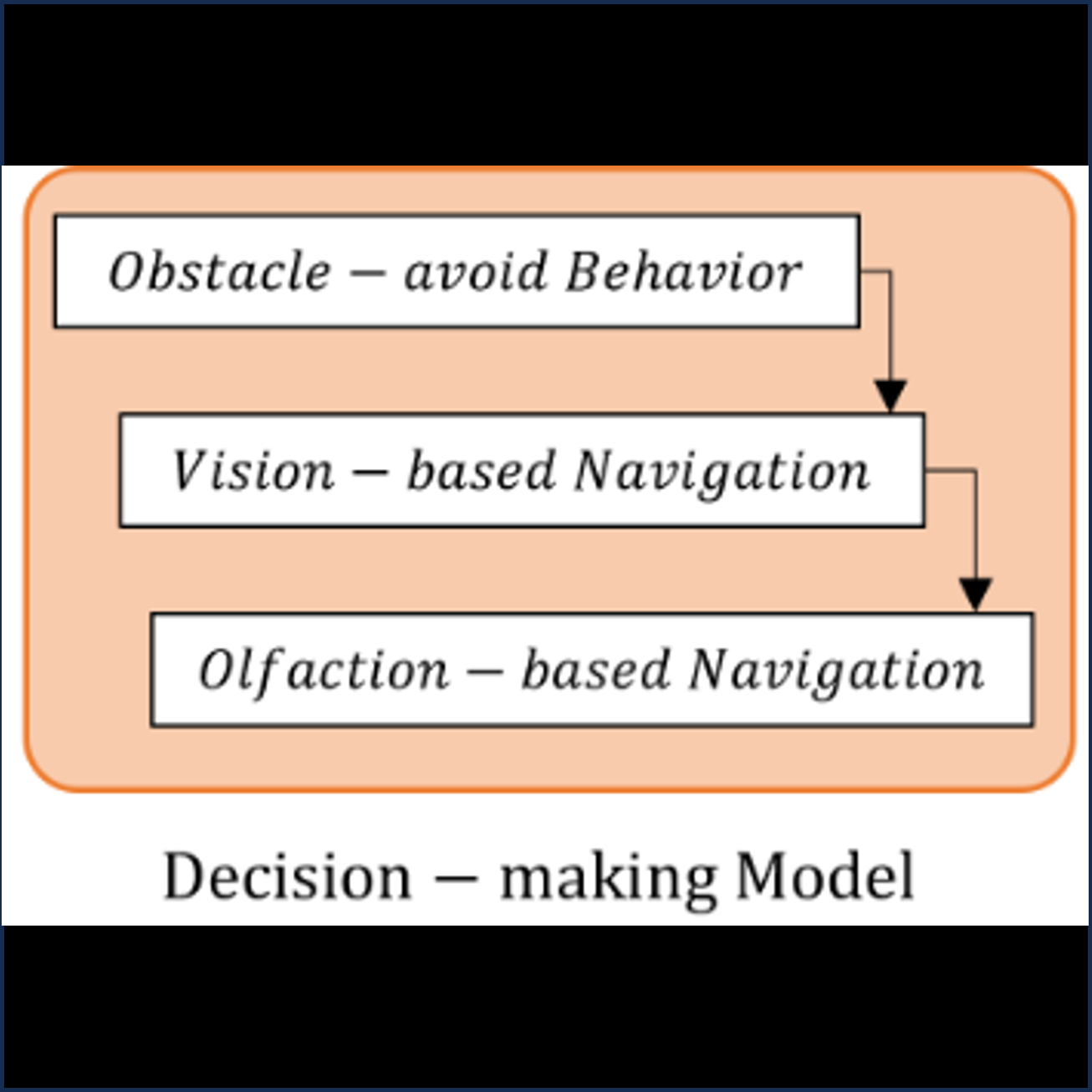
Proposed a Hierachical Control framework to control a robot finding the odor source by coordinating obstacle avoidance, vision-based navigation, and olfaction-based navigation behaviors.
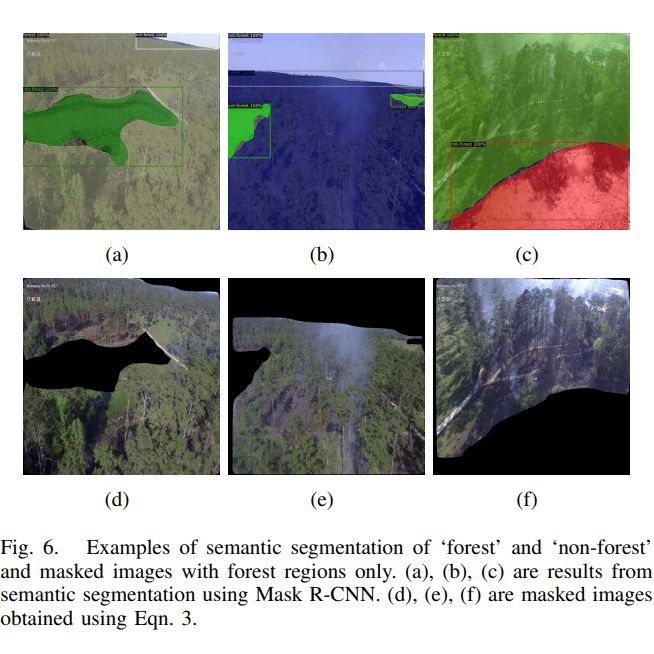
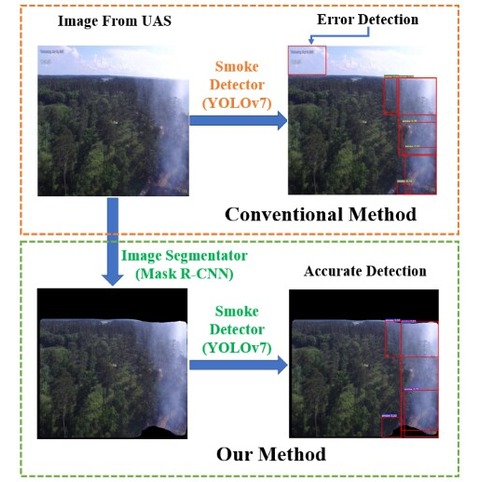
Presented a new vision-based wildfire smoke detection from drone's imageries, which involves image segmentationa and object detection to reduce the false alarm rate.